序章
このページでは、 source-synchronous inputとのインターフェース方法として 01-signal sampling について説明します。この種のデータ ソースとインターフェイスするための他の戦略については、 source-synchronous inputs 全般に関するページで概説されています。このページでは source-synchronous input とは何かについても説明しています。
01-signal sampling の背後にある考え方は、外部 clock が data signalとして扱われるということです。 したがって、 clock は registerによってサンプリングされます。この register は、安定した外部 clockから独立した内部 clock を使用します。
data signals は追加の registersによってサンプリングされます。この目的には、同じ内部 clock が使用されます。この内部 clock は、 01-signal samplingを実装するすべての logic にも使用されます。
この logic は、外部 clockをサンプリングしている register 上の変更を検出します。この register が '0' から '1'に変わるということは、外部 clockに rising edge があったことを意味します。 logic は、他の registers の値を FIFOに書き込むことで、このイベントに応答します。これらの registers には、外部 clock の rising edge が発生したときに存在していた data signals の値が含まれています。
この logic は、 FIFOの clock が外部の clock であり、 FIFOの data inputs が data signalsに直接接続されている場合と同じ結果を実現します。違いは、 logicがどの clock を使用するかです。 外部 clock または内部 clock。 01-signal sampling の利点は、すべての logic が内部 clockのみに依存していることです。この clock は安定していて信頼性があります。外部の clock が誤動作しても、 logic は引き続き正常に動作します。
次の図は 01-signal samplingを示しています。
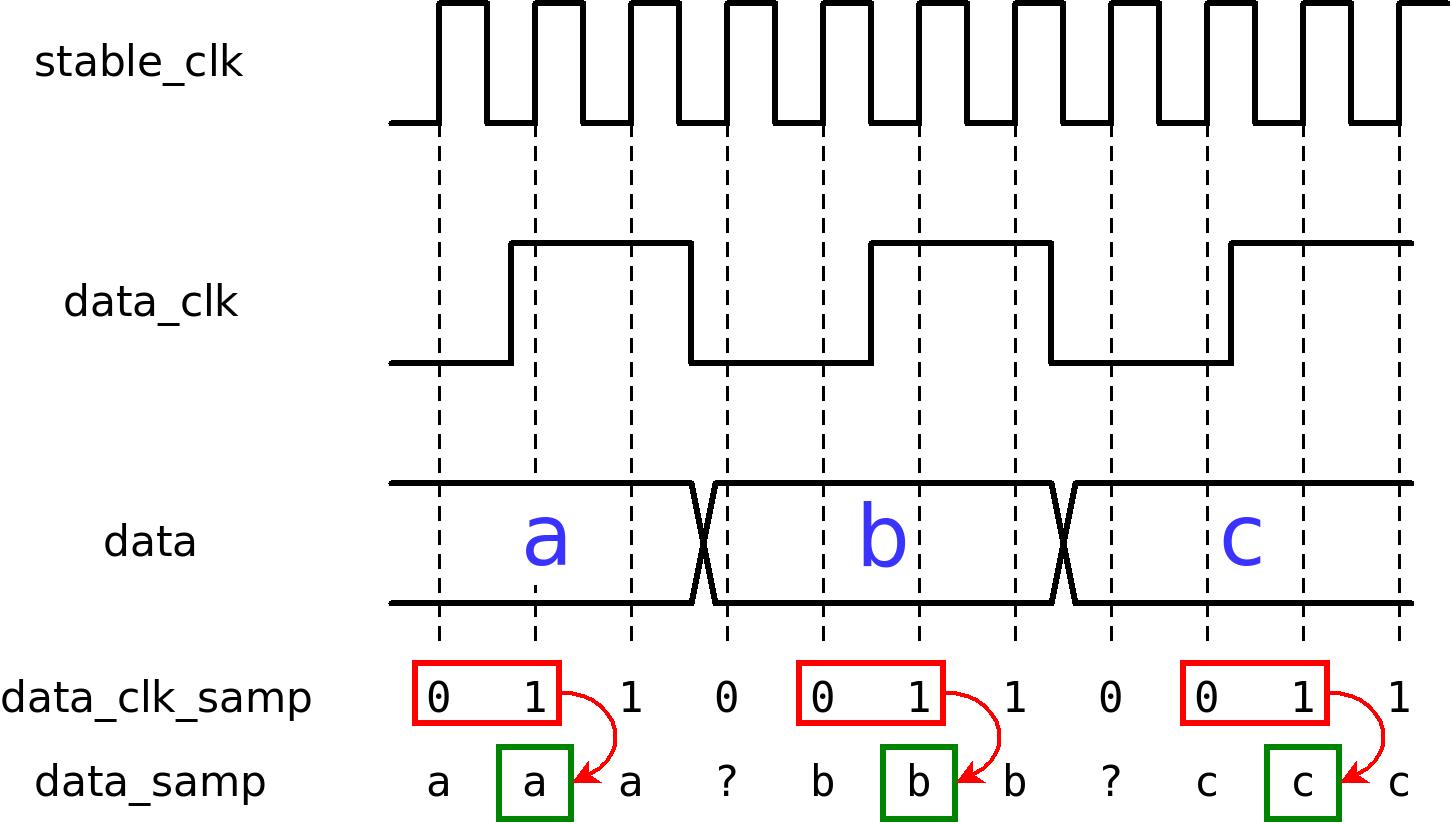
この画像では、 @stable_clk は FPGAの内部 clockです。 @data_clk と @data は FPGAに到達する signals です。 @data_clk_samp と @data_samp は FPGA内部の registers です。外部の signal @data_clk は @data_clk_sampで表されます。 @dataとの関係では、 @data_samp も同様です。
この図は、 @data_clk_sampに「0 1」パターンが出現すると、 @data_samp の値が FIFOに書き込まれることを示しています。これが、この方法が「01-signal sampling」と呼ばれる理由です。
ここで、 FIFO は、到着したデータをどのように処理するかの例として示されています。内部 clock の frequency は data rateよりも大幅に高いため、これは適切なソリューションとなることがよくあります。したがって、より低い clock frequencyに基づく logic でデータの処理を続行すると便利なことがよくあります。 FIFO は、別の clock domainの logic にデータを渡すのに便利な方法です。
それでも、 01-signal samplingに使用されたものと同じ内部 clock を使用して logic の残りの部分を実装することは可能です。 FIFO の使用は可能性の 1 つにすぎません。
Verilogでの例
この Verilog code はそのアイデアを説明しています。外部の clock は @data_clkです。
module top (
input stable_clk,
input data_clk,
input [7:0] data
);
reg [7:0] data_guard, data_samp;
reg data_clk_guard, data_clk_samp, data_clk_samp_d;
wire fifo_wr_en;
always @(posedge stable_clk)
begin
data_guard <= data;
data_clk_guard <= data_clk;
data_samp <= data_guard;
data_clk_samp <= data_clk_guard;
data_clk_samp_d <= data_clk_samp;
end
assign fifo_wr_en = data_clk_samp && !data_clk_samp_d;
data_fifo fifo_i
(
.wr_clk(stable_clk),
.din(data_samp),
.wr_en(fifo_wr_en),
[ ... other ports connected here ... ]
);
endmodule
重要な部分はFIFOの wr_enです。 @fifo_wr_en。この signal は「data_clk_samp && !data_clk_samp_d」に相当します。したがって、この signal は、 @data_clk_sampで「0 1」パターンが検出された結果としてハイになります。これにより、 @data_samp の値が FIFOに書き込まれます。
@stable_clk のみが logicによって clock として使用されることに注意してください。 @data_clk は通常の I/O inputと同じように扱われます。
@data_guard および @data_clk_guard の timing requirements は保証されません。 input ports は、 @stable_clkに対して非同期です。したがって、 @data_guard と @data_clk_guard は metastability guardsになります。 logic は、これら 2 つの registersの値に直接依存しません。一方、 @data_samp と @data_clk_samp は、 registers が metastability guardの 2 段目であるため、 logicによって直接使用されます。
しかし、これは本当に機能するのでしょうか?答えは timing analysisにあります。
Timing analysis
timing analysis と 01-signal sampling は通常の方法とは異なります。 通常、 clock edge と data signals がサンプリングされる瞬間の間には一定の時間差があります。これは、 sampling に使用される clock が data signalsと同期しているためです。しかし、 01-signal samplingでは、 @data の sampling は @stable_clkで実行されます。したがって、 sampling の瞬間は、 data signals自身の timingとは何の関係もありません。代わりに、 logic は、 rising clock edgeに近い @data_clk_samp の値のみを選択します。
つまり、 data clockの rising edge の瞬間と実際の sampling が発生する瞬間の間にはランダムな時間差があることになります。この方法が信頼できるのはなぜでしょうか?
logic designにおける timing の基本については別のページがあります。そのページでは tsu と tholdの意味が説明されています。簡単に言うと、 flip-flopの input port は、 rising edge または clock の前後で安定している必要があります ( flip-flop が rising edgeでアクティブ化されていると仮定します)。 tsu は、 rising edgeの前に input port が安定する必要がある時間を定義します。 thold は、 rising edgeの後に input port が安定するまでの時間を定義します。これらの条件のいずれかに違反した場合、 rising edge に対する flip-flopの応答は予測できません。
これを別の方法で見ることもできます。 input port は、 rising edge付近の特定の期間に安定している必要があります。この期間を Δt = tsu + tholdと呼ぶことにします。 Δt とその他の parametersに基づいて、信頼性の高い動作を保証する timing requirements を見つけます。
timing analysis 全体は、 @data_clk_guard が高く、 @data_clk_samp が低い状況に基づいています。この場合、 clock cycle の 1 つ後に「0 1」パターンが検出されます。つまり、次期 clock cycleでは @data_clk_samp_d は「0」、 @data_clk_samp は「1」となる。結果として @fifo_wr_en は High になるため、 @data_samp にはデータ ソースが意図した値が含まれている必要があります。
したがって、分析では次の質問に焦点を当てます。 @data_clk_guard がハイで @data_clk_samp がローの場合、情報が正しく届くことを保証する @data の要件は何ですか?
分析は 2 つの部分で行われます。 どちらの部分でも、 @data_clk_guard が高く、 @data_clk_samp が低いと仮定します。最初の部分では、次のような質問が行われます。 この前提を破ることなく、 @data_clk が低レベルから高レベルに変化できる最新の瞬間は何ですか?次に、 @data_samp に正しい値が含まれていることを確認する、 @data に関する timing requirement を見つけます。
分析の後半では、逆の質問をします。 @data_clk_guard および @data_clk_sampの前提を破ることなく、 @data_clk が低から高に変化する最も早い瞬間は何ですか?次に、 timing requirementsについても同様の分析を行っていきます。
まず、いくつかのシンボルを定義しましょう。
- tclk: @stable_clkの clock period 。
- tskew: これは、 @data_clk と @dataの ports間の skew です。これは、 signals のソースから FPGAの flip-flopsまでのすべての接続の signal delays 間の最大差です。
- tj: jitter の clock periodへの最大限の貢献。つまり、2 つの clock edges 間の時間差は常に tclk - tj と tclk + tjの間の値になります。より正確に言えば、 clock period がこれらの制限の外にある可能性は無視できます。
分析の最初の部分
この timing diagram は @stable_clkの2つの clock cycles を示しています。以下の説明では、 @data_clk_guard は、右側の rising edge 上の @data_clk から新しい値をコピーします。同様に、 @data_guard は、同じ clock edge上の @data から新しい値をコピーします。
同じ原理により、 @data_clk_samp と @data_samp は左側の @stable_clkの rising clock edge に関連付けられます。
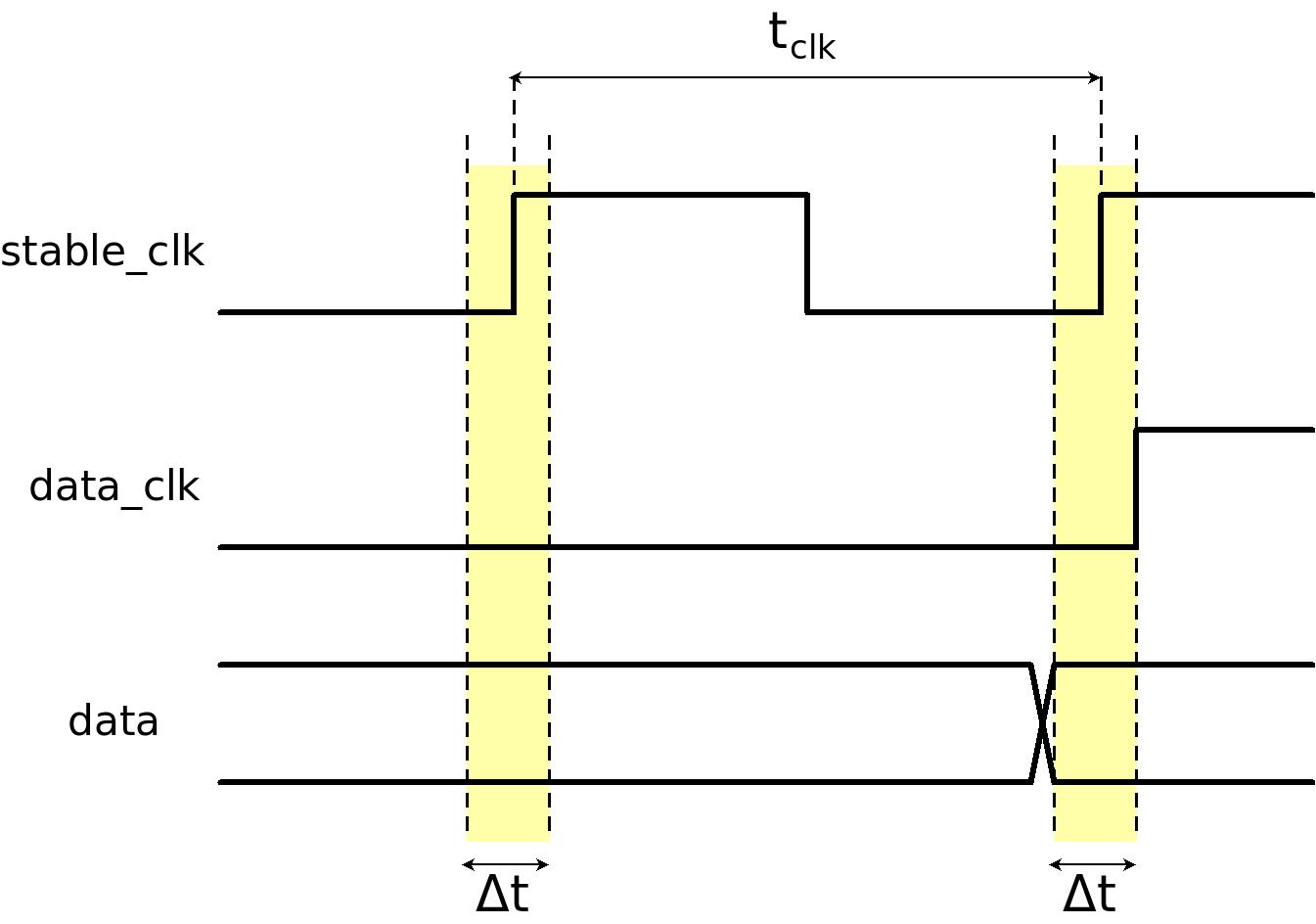
このシナリオでは、 @data_clk は黄色の領域の終わりで正確に High に変化します。 flip-flopの timing requirements は侵害されているため、結果は予測できません。ただし、 @data_clk_guard が高くなり、 @data_clk_samp が低くなる可能性があります。
ただし、 @data_clk の値が少し後で変更されると、 flip-flopの動作は予測可能であるため、 @data_clk_guard は確実に低くなります。 このシナリオでは、 input port は黄色の期間全体にわたって低くなります。だからこそ次のように言えるのです。 @data_clk_guard がハイで @data_clk_samp がローの場合、 @data_clk は上記の timing diagram で示されているよりも早くローからハイに変化します。したがって、 timing diagram は、 @data_clk が可能な限り最も遅い時点で変更されたシナリオを示しています。
@data_guard に信頼できる値が含まれていることを確認するには、 @data がイエロー ゾーンの前で安定している必要があります。これにより、最初の timing requirementが得られます。 @data は、 @data_clkの rising edgeより前の Δt の期間安定している必要があります。
@data_clk が先にローからハイに変更された場合でも、この timing requirement は @data_guardの tsu 要件を引き続き保証することに注意してください。したがって、 flip-flopsの tsu は、 @data_clk_guard が高く、 @data_clk_samp が低いすべてのシナリオで保証されます。
上記の timing diagram には、 skewに関連するものは何も表示されません。 skew を考慮すると、 timing requirement は次のようになります。 @data は、 @data_clkの rising edgeより前の Δt + tskew の期間安定している必要があります。
clock edge は 1 台だけが議論に関与しているため、このシナリオでは jitter を考慮する必要はありません。
分析の第 2 部
これは、このシナリオの timing diagram です。
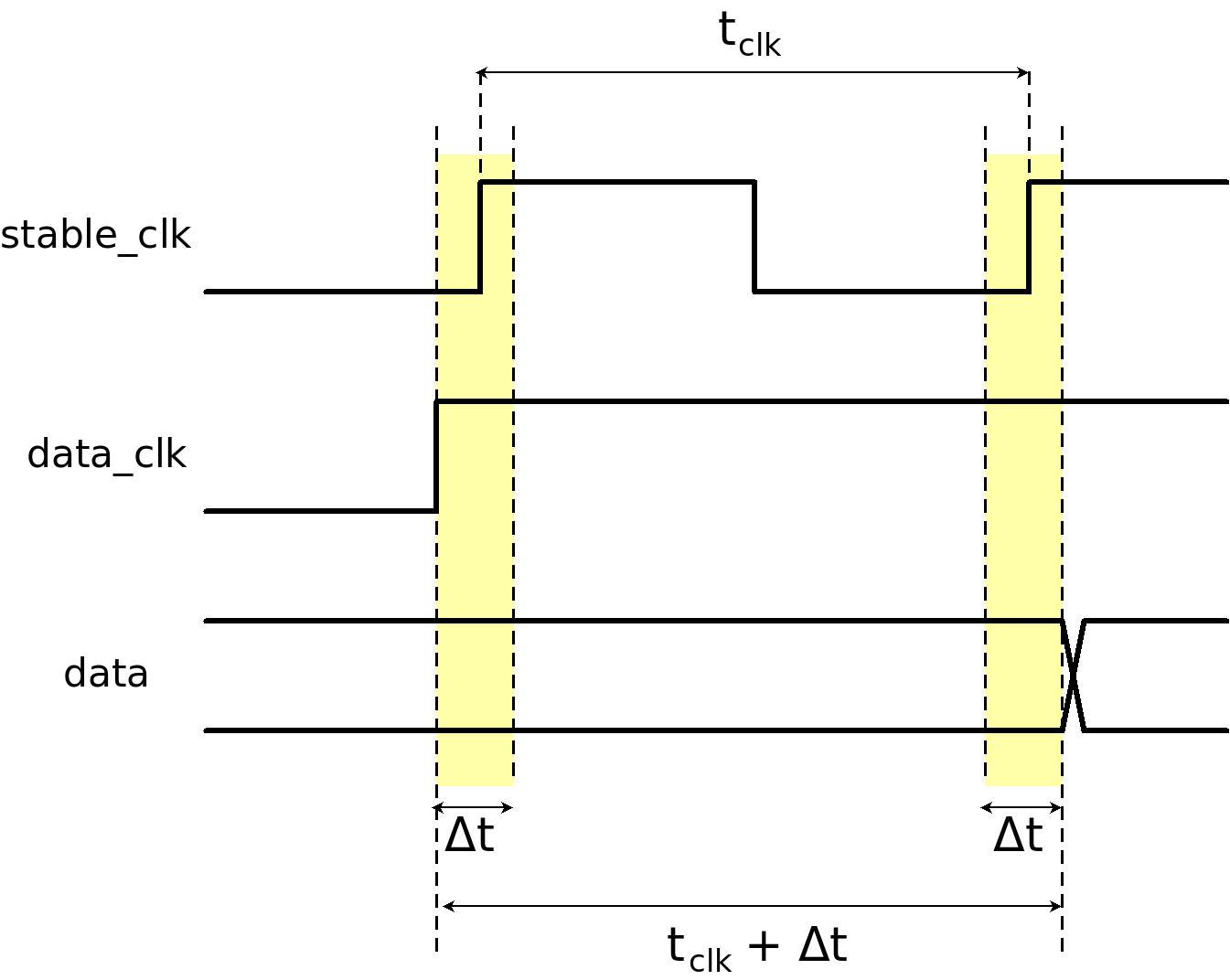
このシナリオでは、 @data_clk は、 @stable_clkの前の clock edgeの黄色の領域の開始時に正確に High に変化します。
この状況では、 @data_clk_guard が高くなることは間違いありません。ただし、 @data_clk_samp の値は、以前の clock cycleの timing violation のため予測できません。以前と同様に、 @data_clk_samp が低くなる可能性があります。ただし、 @data_clk の値がこれより早く変化した場合、 @data_clk_samp は間違いなく高くなります。
したがって、 @data_clk_guard がハイで @data_clk_samp がローの場合、 @data_clk は上記の timing diagram で示されているよりも遅くローからハイに変化します。したがって、 timing diagram は、 @data_clk が可能な限り早い時点で変更されたシナリオを示しています。
@data_guard に正しい値が含まれていることを確認するには、 @data が右側の黄色の領域の後に安定している必要があります。
上記の timing diagram によると、 @data_clkの rising edge と 2 番目の黄色の領域の終わりとの時間差は Δt + tclkです。ただし、 skew と jitter も考慮する必要があります。したがって、 @data は、 @data_clk以降 Δt + tclk + tskew + tj の期間安定している必要があります。
@data_clk が以前に低から高に変更された場合でも、この timing requirement は @data_guardの hold 要件を引き続きカバーすることに注意してください。したがって、 flip-flopsの thold は、 @data_clk_guard が高く、 @data_clk_samp が低いすべてのシナリオで保証されます。
timing requirements
上記の timing analysis の結論として、 01-signal samplingの信頼性の高い動作を保証する 2 つの timing requirements は次のとおりです。
- @data は、 @data_clkの rising edgeよりも少なくとも Δt + tskew の期間安定している必要があります。
- @data は、 @data_clkの rising edgeの後、少なくとも Δt + tclk + tskew + tj の期間安定している必要があります。
これらの要件は複雑に見えるかもしれませんが、多くの場合、それらの要件を確実に達成するのは簡単です。たとえば、 @data が @data_clkの falling edgeに合わせて変更される場合、通常、これらの要件を確保するのは簡単です。 @stable_clk が @data_clkの 3 倍の速度であれば、多くの場合、それで十分です。
ほとんどの場合、 Δt、 tskew 、または tjの正確な値を知る必要はありません。上記の 2 つの要件に基づいて、 Δt と Δt + tskew + tj がどの程度の大きさにできるかを計算するだけで十分な場合がよくあります。 @stable_clkの frequency が十分に高い場合、これら 2 つの式の値は、 FPGAで現実的に可能な値よりも大きくなることがよくあります。
IOB registersは、 FPGAと input ports (tskew) の間の timing の違いを最小限に抑えるために使用する必要があります。また、IOB registers が確実に使用されるように、 timing constraints はこれらの input ports と関連付けて記述する必要があります。
01-signal samplingの亜種
これまでの説明では、 data_clkの falling edgeに合わせて @data も変更されると想定してきました。 @data_clkの rising edgeとともに @data が変更される場合は、 @data_clk_guard がローで @data_clk_samp がハイのときに代わりに logic がアクティブになるように調整する必要があります。言い換えれば、 logic は「1 0」パターンを検索することで @data_clk の falling edge を検出する必要があります。
@dataの値を取得するタイミングについて、別の基準を選択することもできます。たとえば、 @fifo_wr_en を数 clock cycles遅らせる方がよい場合があります。場合によっては、 @fifo_wr_en が上記の提案よりも早くアクティブになる方がよいこともあります。これは、 @data_clk と @dataのタイミング関係によって異なります。信号ソースの datasheet を参照し、上記のように timing を分析します。
@data_clkの frequency が比較的高い場合は、 DDR registers を使用して @data_clk と @dataをサンプリングすることが可能です。このソリューションを実装する logic は少し複雑ですが、同じ原理が適用されます。
@data_guard は本当に metastability guardですか?
この質問に対する簡単な答えは「はい」です。 @data は @stable_clkと非同期であるため、 @data_guardの timing requirements は保証されません。
ただし、 @data_guardのコンテンツが実際に使用される clock cycles に議論を絞り込んでみましょう。 上記の 2 つの timing requirements により、 @data_guard を実装する flip-flops が確実に動作することが保証されることに注意してください。この flip-flops は tsu と thold の両方が保証されています。
したがって、 @data_guard は実際には metastability guardとしては使用されません。この register の使用方法では、 delay registerとしてのみ機能します。ただし、物理的な signal (@data) が誤動作した場合に発生する可能性のある timing violations に対して、追加の register が保護されることは問題ありません。これは、 signal がコネクタを介して FPGA に接続されている場合に特に当てはまります。
実際の例
別のページに、 logic が OV7670 camera sensor に接続する例があります。この logic は、 01-signal samplingを利用してこのカメラ センサーから pixel data を取得します。カメラ センサーからの inputs は次のとおりです。
input pclk_in;
input [7:0] D_in;
input hsync_in, vsync_in;
01-signal sampling を実行する logic は次のとおりです。
(* IOB = "TRUE" *) reg [7:0] D_guard;
(* IOB = "TRUE" *) reg pclk_guard, hsync_guard, vsync_guard;
reg [7:0] D;
reg pclk, hsync, vsync;
wire sample_valid;
reg previous_pclk;
always @(posedge stable_clk)
begin
// Metastability guards on asynchronous inputs
D_guard <= D_in;
pclk_guard <= pclk_in;
hsync_guard <= hsync_in;
vsync_guard <= vsync_in;
D <= D_guard;
pclk <= pclk_guard;
hsync <= hsync_guard;
vsync <= vsync_guard;
previous_pclk <= pclk;
end
assign sample_valid = pclk && !previous_pclk;
明確にするために、ここで紹介する Verilog code と、 OV7670に関するページの Verilog code には若干の違いがあります。これらの違いは、 logic の動作には影響しません。
この Verilog code を、このページの冒頭で紹介した code と比較してみましょう。 signals の名前は異なりますが、意味は同じです。 @dataの代わりに、 @D_in、 @hsync_in 、 @vsync_inが使用できます。 @data_clkの代わりに、 @pclk_inが使用できます。また、 @fifo_wr_enの代わりに、 @sample_validが使用できます。名前の変更は混乱を招く可能性がありますが、上記の Verilog code からの変更はありません。
registersの宣言の前にある「(* IOB = "TRUE" *)」の部分に注意してください。 Vivadoを使用する場合、これは registers を IOBsに挿入するように要求する可能性のある方法です。
この例では、 FIFO は示されていません。これは、すべてのデータを FIFOに書き込みたくないためです。 @sample_valid が高い場合、 @D、 @hsync 、および @vsync にカメラ センサーからの正しい値が含まれていることを意味します。しかし、それは @D を FIFOに書き込むという意味ではありません。 @hsync と @vsyncに依存します。したがって、 OV7670 の例には、ピクセルのみが FIFOに書き込まれるようにする追加の logic があります。
しかし、興味深い部分に移りましょう。 timing analysis。
この例では、 @stable_clk の frequency は 100 MHzです。 @pclk_in の frequency は 25 MHzです。 OV7670の datasheetによれば、信号 @D_in、 @hsync_in 、および @vsync_in は、 @pclk_in がハイからロー (falling edge) に変化した後の 5 ns の間安定することが保証されます。
@pclk_inの clock cycle は 40 nsです。したがって、 falling edge から rising edge までの距離は 20 nsになります。それでは timing requirementsと比較してみましょう。
最初の timing requirement では、 @D_in、 @hsync_in 、および @vsync_in は、 @pclk_inの rising edgeの前に Δt の期間安定している必要がありました。実際には、これらの信号は falling edgeの 5 ns 後から安定しています。したがって、これらの信号は、次の rising edgeまでの少なくとも 15 ns で安定しています。 Δt = tsu + tholdを思い出してください。つまり、 timing requirement は実際には tsu + thold が 15 nsより小さいということになります。これはすべての FPGAに当てはまります。
2 番目の要件は、これらの信号が @pclk_inの rising edgeの後、少なくとも Δt + tclk + tskew + tj の期間安定していることです。ただし、これらの信号は falling edgeの結果としてのみ変化します。したがって、要件は Δt + tclk + tskew + tj が 20 nsより小さいことです。 @stable_clkの frequency は 100 MHzであるため、 tclk は 10 ns に等しくなります。したがって、実際の要件は Δt + tskew + tj が 10 nsより小さいことです。繰り返しますが、これはすべての FPGAで明らかです。
この例では、 FPGAの正確な timing parametersに関する知識がなくても、 timing requirements を簡単に確認できる方法を示します。
結論
01-signal sampling は、 FPGA がサポートできる clock frequency に比べて data rate が低い場合に最適なソリューションです。 data clock は安定している必要はありません。また、 data clock の正確な frequency を事前に知る必要はありません。2 つの timing requirementsを保証すれば十分です。
この方法にはさらに次のような利点もあります。 この clock が短時間非アクティブになった場合、その特定の期間中に data が収集されないという結果しか生じません。この clock の誤動作による損害は、データ フローの中断に限定されます。これにより、システムの目に見える誤動作が発生しますが、この誤動作は clock の問題のように見えます ( FPGA に幽霊が憑いているようには見えません)。
したがって、 data signals の sampling には固有のランダム性がありますが、 01-signal sampling は source synchronous inputの信頼性が高く堅牢なソリューションです。唯一の本当の欠点は、 data rateの制限です。